同济大学VeCaN实验室与德国大众CARIAD开展无人驾驶技术学术交流
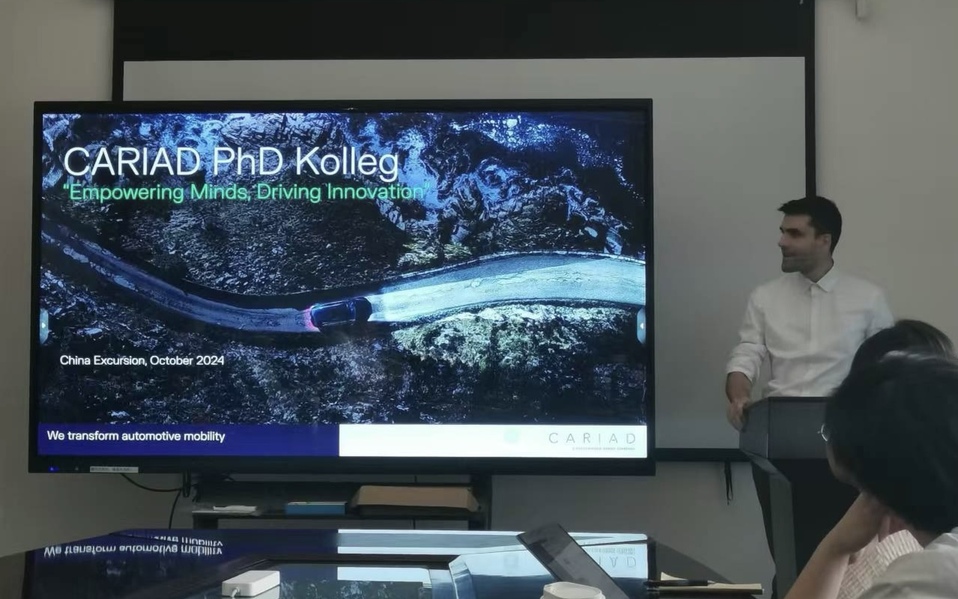
2024年10月24日,德国大众集团旗下的软件子公司CARIAD团队到访同济大学,与同济大学VeCaN实验室展开深入的学术交流活动。本次交流聚焦于无人驾驶领域的两大核心技术——运动规划问题和状态估计问题,双方团队围绕这两个主题分别进行了专题汇报与深入讨论。
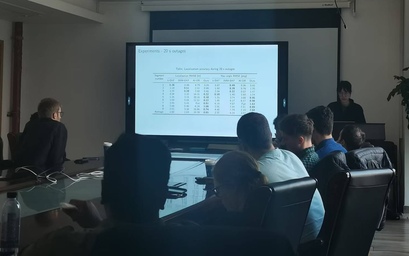
在交流活动中,CARIAD团队首先分享了其在运动规划问题上的研究成果,重点介绍了在复杂城市交通环境中如何通过优化算法与人工智能技术实现动态路径规划和决策。同时,他们还汇报了状态估计领域的最新研究进展,展示了其在车辆定位与传感器融合方面的实践经验。VeCaN实验室则结合自身长期的科研探索,就运动规划和状态估计问题分别作了详细汇报。在运动规划领域,实验室团队展示了其对高动态场景中车辆路径规划策略的创新方法;而在状态估计方面,团队则重点介绍了多传感器数据融合技术的应用,以及提高状态估计精度的前沿研究成果。
|
| |
|  |
此次学术活动深化了CARIAD与VeCaN实验室之间的合作关系,也为双方探索未来的合作方向奠定了基础。双方一致认为,无人驾驶技术的发展需要集全球智慧,通过跨国界的深度合作推动技术突破。这次交流不仅展示了同济大学在智能网联汽车领域的领先研究能力,也体现了CARIAD团队在无人驾驶技术领域的全球影响力。

2024-12-02