 无人车驾驶技术
无人车驾驶技术随着智能化交通的不断发展,无人驾驶车辆成为了各大学校和机构的研究热点。无人驾驶车辆是一种智能化的移动交通工具,它能够代替人类驾驶员完成一系列驾驶行为,它涉及到环境感知、导航定位、智能决策和控制科学等众多研究领域。车辆自主驾驶是通过自身安装的传感器(如激光雷达,摄像头,GPS等)对周围的环境进行感知,根据规划的路径进行运动控制,同时要满足安全性,稳定性和快速性等性能指标。为了满足车辆的性能指标,要考虑到传感器的选择和安装位置,多个工控机的资源分配和通信以及车辆动力学特性对车辆控制的影响等。并且需要通过不断优化环境信息感知,调整控制方法等来提高车辆行驶效率。

全景环视系统在汽车周围架设能覆盖车辆周边所有视场范围的4到8个广角摄像头,对同一时刻采集到的多路视频影像处理成一幅车辆周边360度的车身俯视图,最后在中控台的屏幕上显示,让驾驶员清楚查看车辆周边是否存在障碍物并了解障碍物的相对方位与距离,帮助驾驶员轻松停泊车辆。不仅非常直观,而且不存在任何盲点,可以提高驾驶员从容操控车辆泊车入位或通过复杂路面,有效减少刮蹭、碰撞、陷落等事故的发生。
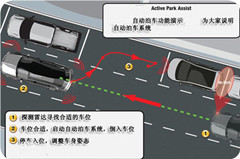
本系统共由泊车辅助传感器、车位检测传感器、轮速传感器、环视传感器系统、泊车转向辅助单元以及显示界面六部分组成。可在平行或垂直倒车入位(泊车)时为驾驶员提供帮助。无论是靠右侧还是左侧泊车,本系统均能为驾驶员提供帮助,在泊车时,系统会在显示界面上通过图像来引导驾驶员完成泊车。
 新能源及其优化
新能源及其优化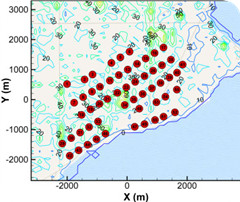
风电场微观选址是根据给定风场的风向、风速、地形、地貌等特征以及风机特性,确定风机安装数量和位置,从而使整个风电场产能最优,同时满足其他经济、社会、环境指标的要求。风电场微观选址优化方法是风电产业合理规划的关键科学问题,决定了风电场产能的大小和风力资源的利用效率。微观选址优化不仅涉及风场的流体动力学分析与计算,而且必须运用先进控制理论进行优化决策。本项目研究风能应用中的关键问题,提出一个基于风电场地形、地貌、风速、风向、尾流效应、风机特性等诸多因素的风电场微观选址的优化方法,实现多机型三维空间选址技术,使风电场发电量在目前国际公认成果的基础上提高10%以上,并提高优化工作效率。更多关于本课题的研究请点击访问 。

近年我国已经成为了全球风电装机容量增长最快的国家。随着越来越多的风电场的并网运行,这种随机性、波动性风电对电力系统的运行造成了很大的影响。因此风电场区域的短期风速预测问题越来越受到关注。较为准确的短期风速预测能够为合理安排风电场产出、保障电力系统安全稳定的运行、降低风电场运行成本做出贡献,可以提高风力发电的经济效益和环境效益。本项目对风电场区域短期风速预测问题展开研究,分析了现有短期风速预测方法以及主要问题,在此基础上提出了一种新的风速预测方法。该方法提出了根据风速变化的物理特征对风速的变化情况进行分类的方式,进一步研究了针对不同风况模式使用不同的基于统计模型的风速预测算法进行在线风速预测。

现今在世界范围内数据中心能源消耗巨大。针对能耗高同时利用率低的现状,在数据中心层面提出优化控制方法解决这个问题具有重要的意义,但国际上对此问题的研究亦处于起步阶段。在数据中心层面上实施合理的控制与管理能够有效的降低数据中心的能耗。本项目通过对数据中心进行实时优化控制,在保证数据中心服务质量的前提下尽可能减少其能源消耗。相对于以往简单控制和设备更新等提高数据中心效率的方法,实时优化控制能够在不更换大量现有设备的情况下大幅度提高数据中心现有设备利用率,即减少设备成本的同时降低数据中心能源消耗。
 成果展示
成果展示